СИСТЕМАХОИ АВТОМАТЙ ХАЛЛИ ЭЛЕКТРОМЕХАНИКА



Тавсифи кӯтоҳ:
• БОВАРИИ АМНИЯТ,
• КОРХОИ БАЛАНД,
• САМАРАИ БАЛАНД
Тарҳрезии асосӣ ва муфассали тамоми системаи автоматикунонӣ
Конфигуратсияи шабака
Барномаи автоматикунонии асосӣ
Технологияи идоракунии интиқол
Истехсоли кабинахои автоматии идоракунй
Ҷойгиркунии сайт
Хизматрасонии давраи ҳаёти лоиҳа
Табдилдиҳандаи басомад.
Назоратчии PLC.
Назоратчии ҳаракат.
Шишаи ламсӣ. Модули майдони IO.




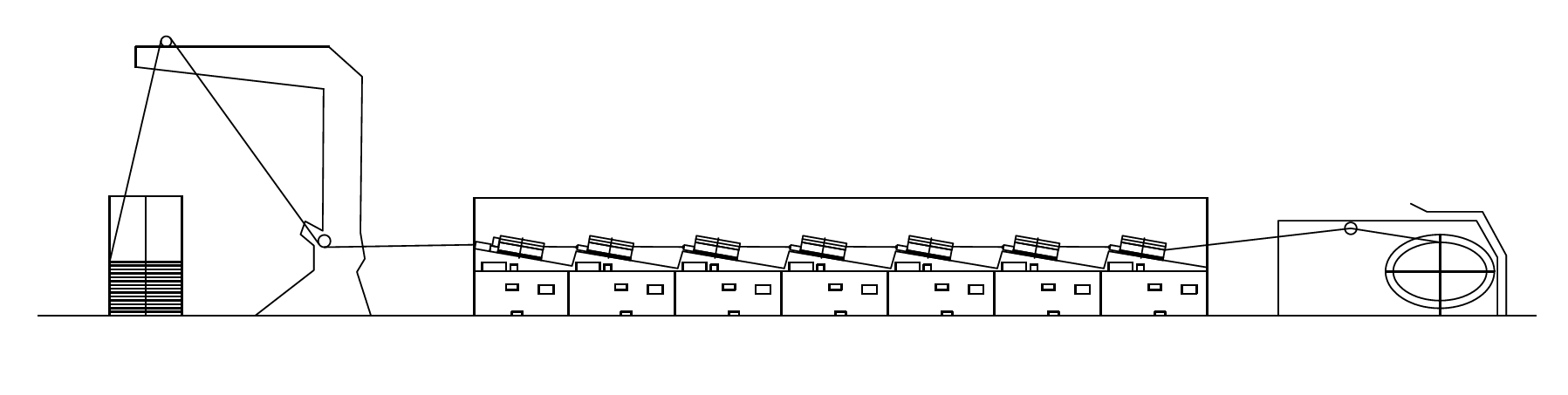
SростWире-расмкунйMдард
• мошини симкашӣ як таҷҳизоти муҳим барои истеҳсоли сим металлӣ аст,, асосан сим металлӣ кашидани ба хусусиятҳои гуногуни filaments.
• Муносиб барои кашидани ҳама намуди сим металлӣ поён 16mm, махсусан мувофиқ барои кашидани талаботи сифати баланди сим кафшер сим кафшер, сим кафшер газ, сим пӯлоди алюминий пӯшида, сим пӯлоди prestressed, сим шланг, сим пружинӣ, сим сими пӯлод ва карбон баланд сими пулодй.
• Талаботи назорати барқии мошини кашидани сим баланд аст ва устувории системаи назорати барқ, махсусан талаботи дақиқи назорати шиддат, бевосита ба сифат ва баромади маҳсулот таъсир мерасонад.
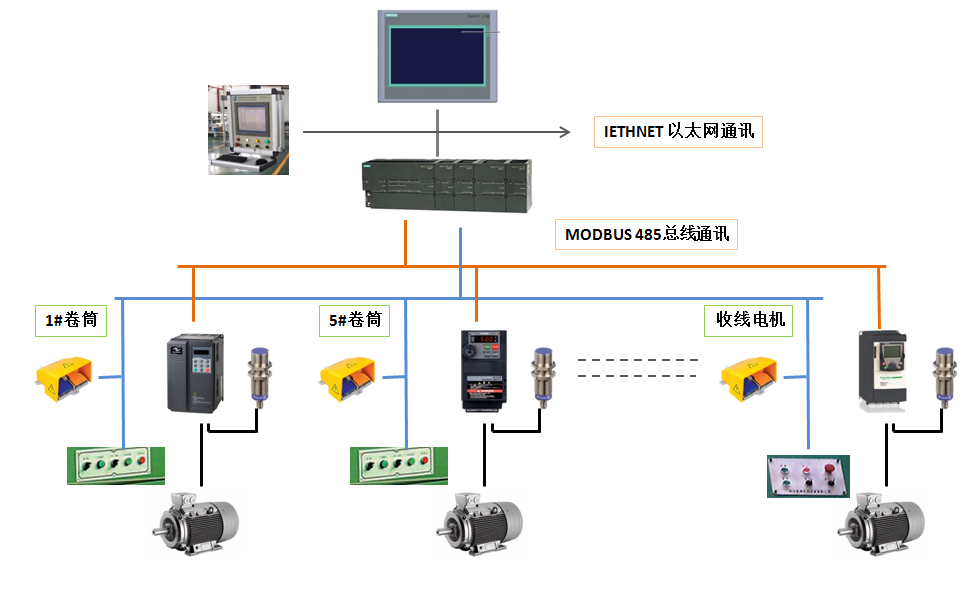
• Ҳалли барқ 1:
Хусусиятҳо: Истифодаи сахтафзорро сарфа кунед ва ба ин васила сатҳи нокомии таҷҳизотро коҳиш диҳед. Имконияти қавӣ, ки барои истифодаи як қатор инвертер дар бозор мувофиқ аст, арзиши сахтафзори системаи барқ нисбатан паст аст.
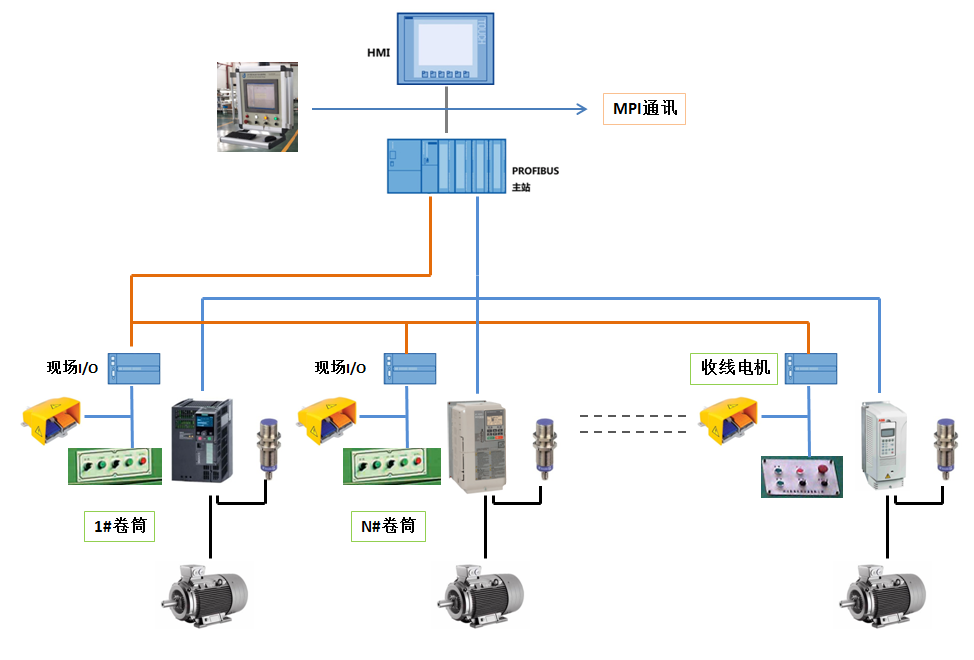
• Ҳалли барқ2:
Хусусиятҳо: Сохтори оддӣ, ноқилҳои кабелӣ камтар. Махсусан барои интиқоли масофа мувофиқ, метавонад хароҷоти зиёди кабелро сарфа кунад. Бо истифода аз автобус тақсимшудаи модули I/O, суръати интиқоли сигнал зуд, дар вақти воқеӣ қавӣ ва нигоҳдории осон аст; Ҳама функсияҳои назорати вақти воқеӣ (мантиқи I/O, амалиёти PID, идоракунии хатогӣ) аз ҷониби PLC, замимаи фасеҳ анҷом дода мешаванд; Экрани сенсорӣ танҳо параметрҳоро назорат мекунад, ворид мекунад ва пойгоҳи додаҳоро идора мекунад.

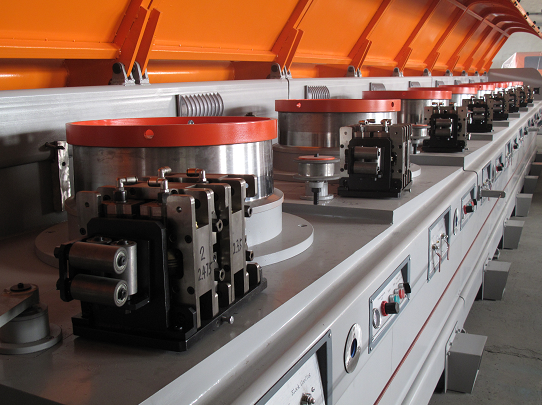
Пеш ва қафо функсияи ҳисоббарории PI доранд (аз ҷумла мошини печи I-чарх), барои таъмини шиддати хуб ҳангоми ришта бидуни нуқтаи ягона барои танзим вуҷуд дорад. Вайроншавии баъзе нуқтаҳо боиси интиқоли падидаи зарбаи тамоми система мегардад, ки коркарди беназир, новобаста аз он, ки бозуи чархзананда дар ҳолати мӯътадил нигоҳ дошта мешавад. Мувофиқи вазни моддӣ қатъи автоматӣ муқаррар карда мешавад. Воҳиди экрани сенсории рангаи идоракунии сайт барои параметрҳои расми ҷорӣ, басомади кор, суръат, формулаи мурда, вазни дарозӣ ва ҳолати хато, насб ва идоракунӣ. Вакте ки хати фавкулодда истад. Ҳар як диски барабан губернатори табдили басомади векториро қабул мекунад, ресандагии баландсуръати устувор ва боэътимодро таъмин мекунад. Реҷаи идоракунии автобуси ронанда ва контроллер дар муқоиса бо назорати анъанавии суръати аналогӣ бартариҳои дақиқ, дар вақти воқеӣ, қобилияти қавии зидди дахолат дорад.

- English
- French
- German
- Portuguese
- Spanish
- Russian
- Japanese
- Korean
- Arabic
- Irish
- Greek
- Turkish
- Italian
- Danish
- Romanian
- Indonesian
- Czech
- Afrikaans
- Swedish
- Polish
- Basque
- Catalan
- Esperanto
- Hindi
- Lao
- Albanian
- Amharic
- Armenian
- Azerbaijani
- Belarusian
- Bengali
- Bosnian
- Bulgarian
- Cebuano
- Chichewa
- Corsican
- Croatian
- Dutch
- Estonian
- Filipino
- Finnish
- Frisian
- Galician
- Georgian
- Gujarati
- Haitian
- Hausa
- Hawaiian
- Hebrew
- Hmong
- Hungarian
- Icelandic
- Igbo
- Javanese
- Kannada
- Kazakh
- Khmer
- Kurdish
- Kyrgyz
- Latin
- Latvian
- Lithuanian
- Luxembou..
- Macedonian
- Malagasy
- Malay
- Malayalam
- Maltese
- Maori
- Marathi
- Mongolian
- Burmese
- Nepali
- Norwegian
- Pashto
- Persian
- Punjabi
- Serbian
- Sesotho
- Sinhala
- Slovak
- Slovenian
- Somali
- Samoan
- Scots Gaelic
- Shona
- Sindhi
- Sundanese
- Swahili
- Tajik
- Tamil
- Telugu
- Thai
- Ukrainian
- Urdu
- Uzbek
- Vietnamese
- Welsh
- Xhosa
- Yiddish
- Yoruba
- Zulu
- Kinyarwanda
- Tatar
- Oriya
- Turkmen
- Uyghur